

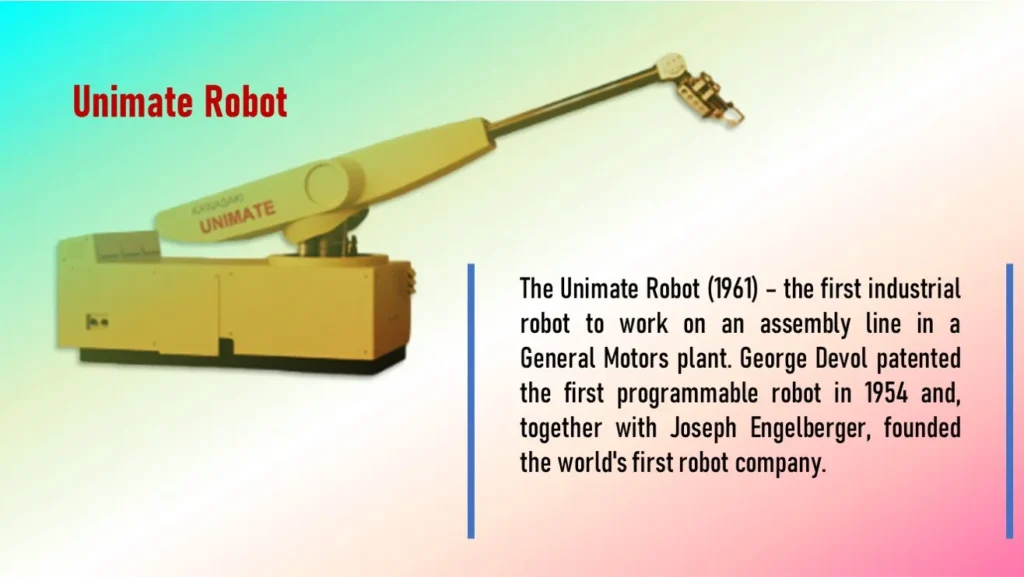
The Unimate robot (1961) – the first industrial robot to work on an assembly line in a General Motors plant. George Devol patented the first programmable robot in 1954 and, together with Joseph Engelberger, founded the world’s first robot company.
This robot moves with six degrees of freedom and stored step-by-step digital commands making it the first industrial robot ever created.
Early 20th Century
The term “robot” was coined in the 1920 play “R.U.R.” (Rossum’s Universal Robots) by Czech writer Karel Čapek. Westinghouse Electric Corporation introduced “Televox” in 1927 – one of the first machines controlled by voice commands.
The first patent for an industrial robot was granted in 1939 to Griffith P. Taylor.
1950s and 1960s:
George Devol patented the first programmable robot in 1954 and, together with Joseph Engelberger, founded the world’s first robot company.
The Unimate robot (1961) – the first industrial robot to work on an assembly line in a General Motors plant.
1970s
The development of the Stanford Arm in 1969, an early precursor to today’s more advanced robotic arms.
The ASEA IRB 6/60, developed in 1975, was the first robot to be controlled by a microprocessor.
MIT’s Silver Arm in 1974, which had touch and pressure sensing capabilities.
1980s
The introduction of direct drive motors, which enhanced the speed and precision of robotic movements.
The PUMA (Programmable Universal Machine for Assembly) robotic arm became an industry standard.
1990s
Honda introduced the humanoid robot “P3” in 1996. It was designed to walk and climb stairs, and had the ability to recognize and respond to human voice commands. “P3” was an improvement over Honda’s previous humanoid robot, “P2”, which was much less advanced. “P3” was also notable for its use of artificial muscles, which allowed for smoother and more natural movement.
However, “P3” was not intended for commercial production, and was primarily used for research purposes.
Development of smaller, collaborative robots designed to work alongside humans without protective barriers – Co-bots.
2000s
Boston Dynamics introduced BigDog in 2005, a quadruped robot designed for the U.S. military.
The DARPA (Defence Advanced Research Projects Agency of USA) Grand Challenge (2004 & 2005) boosted developments in autonomous vehicles.
2010s
Robots became more interconnected with the Internet of Things (IoT). Open-source robot operating systems, such as ROS (Robot Operating System), gained popularity, enabling more collaboration and faster innovation.
Soft robotics emerged, inspired by the flexibility and adaptability of biological organisms.
Boston Dynamics unveiled “Spot” and “Atlas”, showcasing advanced mobility and balance.
Boston Dynamics unveiled “Spot” and “Atlas” as their most advanced robots in 2016 and 2013, respectively. “Spot” is a four-legged robot designed for mobility and rough terrain, while “Atlas” is a humanoid robot with impressive mobility and balance.
Both robots are equipped with advanced sensors and software that enable them to navigate complex environments and perform a range of tasks. “Spot” has been used for applications such as remote inspection of oil rigs and construction sites, while “Atlas” has been used for disaster response and search and rescue missions.
Advancements in deep learning and artificial intelligence resulted in robots with better perception, decision-making, and task performance.
2020s and Beyond
Continued integration of AI and machine learning in robotics for more intelligent decision-making.
Greater emphasis on human-robot collaboration and co-bots. Expansion of robotics in healthcare, especially in surgeries and patient care.
Autonomous vehicles and drones became more commercialized and integrated into societal infrastructures.